

AI Just Got Better at Counting Trees
Table of Links
Abstract and 1 Introduction
- Materials and Methods
- Results and Discussion
- Conclusion and References
3 RESULTS AND DISCUSSION
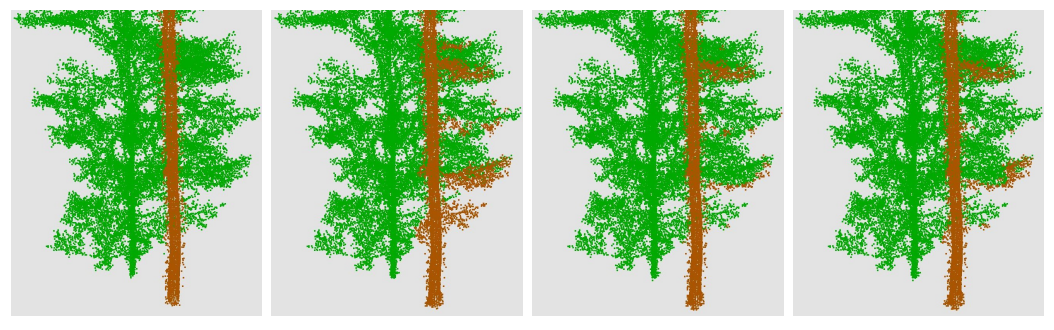
Segmentation results were computed for the point cloud L1W (MLS, deciduous dominated). Results obtained by using the publicly available TreeLearn checkpoint without further training serve as a baseline (Table 3). Even when fine-tuning the model with out-of-domain data (UAV, coniferous dominated), instance segmentation performance in terms of the F1-score increases substantially from 93.98 % to 96.25 %. In terms of tree detection (one FP) and semantic segmentation (99.41%), the fine-tuned model performs slightly worse than the baseline. However, these aspects are less important compared to instance segmentation performance. For example, FP predictions can be manually discarded or merged into complete trees without much effort if they are not too frequent. When using in-domain data (MLS+TLS, deciduous dominated) for fine-tuning, instance segmentation performance is further increased to 97.31% (see Fig. 1 for a qualitative comparison). Since the number of trees used during training is roughly equal in the in-domain and out-of-domain conditions, the performance gap is most likely due to the domain-shift. However, other factors, such as differences in forest complexity, are hard to quantify and cannot be controlled for. When using all available data for training, test performance decreases slightly (96.88 %) compared to only using in-domain data. In addition to quantitative segmentation results on L1W, all three models were used to obtain qualitative results on RMIT, a low-resolution UAV point cloud (Fig. 2). These results suggest that an adequate segmentation performance on low-resolution UAV data can only be achieved when including it during training. If only MLS+TLS data is used, segmentation quality decreases drastically due to severe cases of merged trees.
4 CONCLUSION
In this paper, we trained the deep-learning-based tree segmentation method TreeLearn with data from various domains and systematically evaluated its test performance. It was shown that a model trained on out-of-domain coniferous dominated UAV point clouds can generalize to deciduous dom
\ 
\ 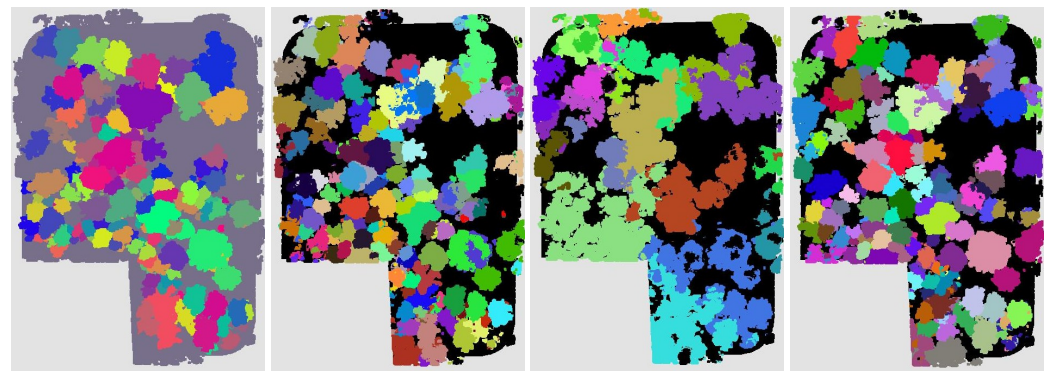
\ inated MLS point clouds. Qualitative results indicate that training exclusively with high-resolution data, although improving performance in this domain, leads to poor generalization in low-resolution UAV settings (Fig. 2). Including UAV data in addition to high-resolution data during training alleviates this issue. This emphasizes the importance of a broad training data basis to obtain models that are applicable to a wide range of domains. To enrich the available forest point clouds, labeled tree data from previous works was propagated to the whole forest point cloud and is made publicly available at https://doi.org/10.25625/QUTUWU. Going forward, a quantifiable characterization of different forest point clouds should be established to enable a more thorough and systematic comparison between domains. Furthermore, the consequences of stronger domain-shifts in terms of forest structure on model performance should be investigated, for example by using dense tropical forests. Such experiments are crucial to determine what exactly is needed in terms of model development and data provision to obtain powerful and general tree segmentation models.
\ The results of this study can be regarded as preliminary evidence for the potential of deep learning to obtain general tree segmentation methods. While such methods rely on high-quality labeled forest data, many recent works have acknowledged this need by providing publicly available datasets. Due to the rapid development of deep learning methods and the availability of more and more highquality labeled data, we expect deep-learning-based tree segmentation to become an increasingly powerful tool. In contrast to traditional segmentation methods, such methods are able to learn segmentation rules for forest point clouds with diverse characteristics in a data-driven way, thus eliminating the need for cumbersome hyperparameter tuning or models designed for specific domains. These features make methods user-friendly and practically applicable given highly diverse forest and point cloud characteristics.
REFERENCES
Andrew Burt, Mathias Disney, and Kim Calders. Extracting individual trees from lidar point clouds using treeseg. Methods Ecol. Evol., 10(3):438–445, 2019. doi: https://doi.org/10.1111/ 2041-210x.13121.
\ Kim Calders, Hans Verbeeck, Andrew Burt, Niall Origo, Joanne Nightingale, Yadvinder Malhi, Phil Wilkes, Pasi Raumonen, Robert GH Bunce, and Mathias Disney. Laser scanning reveals potential underestimation of biomass carbon in temperate forest. Ecological Solutions and Evidence, 3(4): e12197, 2022.
\ GreenValley International. Lidar360 point cloud post-processing software, 2022. URL https: //greenvalleyintl.com/LiDAR360. Accessed: 26.10.2022.
\ Jonathan Henrich, Jan van Delden, Dominik Seidel, Thomas Kneib, and Alexander Ecker. Treelearn: A comprehensive deep learning method for segmenting individual trees from forest point clouds. arXiv preprint arXiv:2309.08471, 2023.
\ Li Jiang, Hengshuang Zhao, Shaoshuai Shi, Shu Liu, Chi-Wing Fu, and Jiaya Jia. Pointgroup: Dualset point grouping for 3d instance segmentation. In Proc. IEEE/CVF conf. comput. vis. Pattern recognit., pp. 4867–4876, 2020. doi: https://doi.org/10.1109/cvpr42600.2020.00492.
\ Karel Kuzelka, Martin Slavık, and Peter Surovy. Very high density point clouds from uav laser ` scanning for automatic tree stem detection and direct diameter measurement. Remote Sensing, 12 (8):1236, 2020.
\ Ilya Loshchilov and Frank Hutter. Sgdr: Stochastic gradient descent with warm restarts, 2016.
\ Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization, 2017.
\ Stefano Puliti, J Paul McLean, Nicolas Cattaneo, Carolin Fischer, and Rasmus Astrup. Tree height-growth trajectory estimation using uni-temporal uav laser scanning data and deep learning. Forestry, 96(1):37–48, 2023a.
\ Stefano Puliti, Grant Pearse, Peter Surovy, Luke Wallace, Markus Hollaus, Maciej Wielgosz, and ` Rasmus Astrup. For-instance: a uav laser scanning benchmark dataset for semantic and instance segmentation of individual trees. arXiv prepr. arXiv:2309.01279, 2023b. doi: https://doi.org/10. 1109/ccdc52312.2021.9602282.
\ Charles R Qi, Or Litany, Kaiming He, and Leonidas J Guibas. Deep hough voting for 3d object detection in point clouds. In proc. IEEE/CVF Int. Conf. Comput. Vis., pp. 9277–9286, 2019. doi: https://doi.org/10.1109/iccv.2019.00937.
\ Andreas Tockner, Christoph Gollob, Ralf Kraßnitzer, Tim Ritter, and Arne Nothdurft. Automatic tree crown segmentation using dense forest point clouds from personal laser scanning (pls). Int. J. Appl. Earth Obs. Geoinformation, 114:103025, 2022. doi: https://doi.org/10.1016/j.jag.2022. 103025.
\ Jan Trochta, Martin Krcek, Tomas Vrska, and Kamil Kral. 3D Forest: An application for descriptions of three-dimensional forest structures using terrestrial LiDAR. PloS one, 12(5):e0176871, 2017. doi: https://doi.org/10.1371/journal.pone.0176871.
\ Thang Vu, Kookhoi Kim, Tung M Luu, Thanh Nguyen, and Chang D Yoo. Softgroup for 3d instance segmentation on point clouds. In Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., pp. 2708–2717, 2022. doi: https://doi.org/10.1109/cvpr52688.2022.00273.
\ Martin Wieser, Gottfried Mandlburger, Markus Hollaus, Johannes Otepka, Philipp Glira, and Norbert Pfeifer. A case study of uas borne laser scanning for measurement of tree stem diameter. Remote Sensing, 9(11):1154, 2017.
\ B Xiang, T Peters, T Kontogianni, F Vetterli, S Puliti, R Astrup, and K Schindler. Towards accurate instance segmentation in large-scale lidar point clouds. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 10:605–612, 2023. doi: https://doi.org/10. 5194/isprs-annals-X-1-W1-2023-605-2023.
\
:::info Authors:
(1) Jonathan Henrich, Chairs of Statistics and Econometrics, Faculty of Economics, University of Gottingen, Germany (jonathan.henrich@uni-goettingen.de)
(2) Jan van Delden, Institute of Computer Science, University of Gottingen Germany (jan.vandelden@uni-goettingen.de).
:::
:::info This paper is available on arxiv under CC by-SA 4.0 Deed (Attribution-Sharealike 4.0 International) license.
:::
\


You May Also Like

Sterling Weakens As Dollar Soars On Geopolitical Escalation And Bailey’s Cautious Stance

Dow Jones futures plunge as risk aversion increases after Trump’s comments




